


Ingenieros del MIT diseñan microrobot volador que realiza 10 volteretas en 11 segundos, imitando la agilidad de un insecto.
- Robots diminutos voladores, rápidos como insectos.
- Maniobras acrobáticas, giros y aceleración extrema.
- IA para controlar vuelo complejo en tiempo real.
- Rescates en espacios estrechos, inspecciones seguras.
- Impacto ambiental: menos maquinaria pesada, menos riesgos.
- Tecnología con potencial para emergencias y conservación.
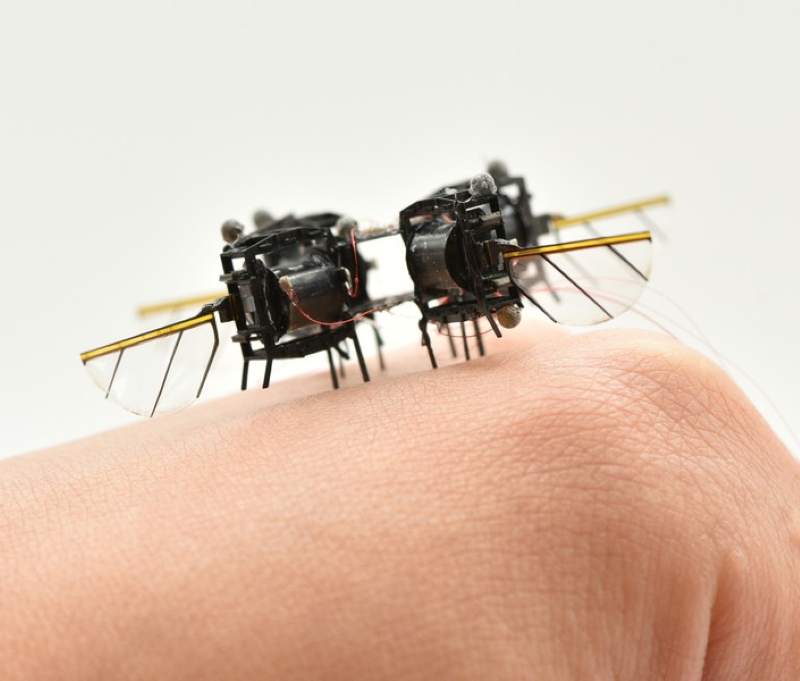
Ingenieros del MIT diseñan un microrobot aéreo capaz de volar tan rápido como un abejorro
En el futuro, estos diminutos robots voladores podrían ayudar en la búsqueda de personas atrapadas bajo los escombros tras un terremoto. Su tamaño y agilidad les permitirían acceder a huecos estrechos donde los drones convencionales ni siquiera podrían entrar, esquivando fragmentos inestables o polvo en suspensión.
Hasta ahora, los microrrobots aéreos solo habían logrado vuelos lentos y trayectorias suaves, muy lejos de la agilidad de un insecto real… hasta hoy.
Un equipo colaborativo ha diseñado un controlador basado en inteligencia artificial que da a este robot la capacidad de ejecutar trayectorias acrobáticas, incluidas volteretas continuas. Con una arquitectura de control dividida en dos fases, lograron aumentar la velocidad en un 450 % y la aceleración en un 250 % respecto a sus mejores prototipos anteriores.
El resultado no es menor: 10 volteretas en 11 segundos sin desviarse más de 4–5 centímetros de su ruta prevista, incluso con ráfagas de aire.

Kevin Chen, profesor asociado del MIT y coautor del estudio, insiste en el objetivo final: lograr robots que vuelen en entornos donde un dron convencional tendría graves dificultades, pero donde un insecto se movería con fluidez.
Un controlador basado en inteligencia artificial
El equipo de Chen llevaba años perfeccionando estos robots. La versión más reciente, algo más grande que una microcassette y con un peso inferior al de un clip, incorpora alas más grandes y unos músculos artificiales blandos capaces de batir a altísimas frecuencias.
La limitación, sin embargo, estaba en el cerebro: el controlador se ajustaba manualmente, lo que impedía aprovechar el potencial de la mecánica del robot.

Para que volara con agresividad y precisión insectil, hacía falta un sistema capaz de manejar incertidumbres, optimizar maniobras complejas y responder en milésimas de segundo. El problema: cualquier controlador suficientemente potente resultaba demasiado costoso, computacionalmente hablando, para ejecutarse en tiempo real.
La colaboración con el equipo de Jonathan How permitió un avance clave: una arquitectura de dos pasos, tan robusta como ágil.
Primero, desarrollaron un controlador predictivo por modelos, capaz de prever el comportamiento del robot y calcular el plan óptimo para cada maniobra extrema. Este planificador, aunque exigente, puede simular giros, frenadas bruscas o series de volteretas teniendo en cuenta límites físicos y de seguridad.
A partir de ahí, entrenaron mediante imitación una política basada en aprendizaje profundo, que condensa esa inteligencia de alto nivel en un modelo ligero y apto para ejecutarse en tiempo real. El truco estuvo en generar la cantidad justa de datos de entrenamiento para no saturar el sistema y, a la vez, cubrir todos los escenarios críticos.
Rendimiento comparable al de un insecto
En las pruebas, el robot voló un 447 % más rápido, aceleró un 255 % más y mantuvo una precisión extraordinaria. Logró movimientos “sacádicos”, esos cambios bruscos de cabeceo que los insectos utilizan para orientarse y estabilizar la visión. Esta biomimética abre la puerta a incorporar cámaras y sensores en el futuro para vuelos autónomos al aire libre.
El siguiente reto será lograr que estos microrobots vuelen sin depender de sistemas externos de captura de movimiento. También quieren estudiar cómo evitar colisiones entre ellos y cómo coordinar vuelos grupales.
Expertos externos, como Sarah Bergbreiter de Carnegie Mellon University, destacan la capacidad del robot para mantener maniobras precisas pese a turbulencias superiores a 1 metro por segundo y a las tolerancias propias de la fabricación a tan pequeña escala.
Aunque el controlador aún no se ejecuta a bordo —requiere un ordenador externo—, los ensayos apuntan a que versiones simplificadas podrían funcionar en el propio robot. Un avance significativo para escalar esta tecnología a misiones reales.
Potencial
Esta tecnología tiene margen para convertirse en una herramienta decisiva en tareas que hoy requieren recursos muy intensivos. Podrían utilizarse para:
- Inspeccionar instalaciones solares o eólicas sin helicópteros ni vehículos pesados;
- Monitorizar bosques en busca de focos de incendio antes de que se propaguen;
- Evaluar daños tras tormentas o inundaciones sin poner en riesgo equipos humanos;
- Mapear biodiversidad en áreas protegidas sin perturbar la fauna.
El avance no es solo un hito robótico. Es una vía para reducir impactos, abordar emergencias con más rapidez y ampliar el alcance de la conservación ambiental sin multiplicar nuestra huella tecnológica. Un pequeño robot con ambiciones grandes, y un ejemplo de cómo la innovación puede alinearse —de verdad— con un futuro más sostenible.

Yerai Salim Casco dice
ER HUESO