

El fabricante de robots Milrem Robotics y la Universidad de Tartu (Estonia) han colaborado para desarrollar dos tipos de robots forestales autónomos que podrían plantar miles de árboles al día. Los robots se basan en la gama de vehículos terrestres autónomos de la empresa.
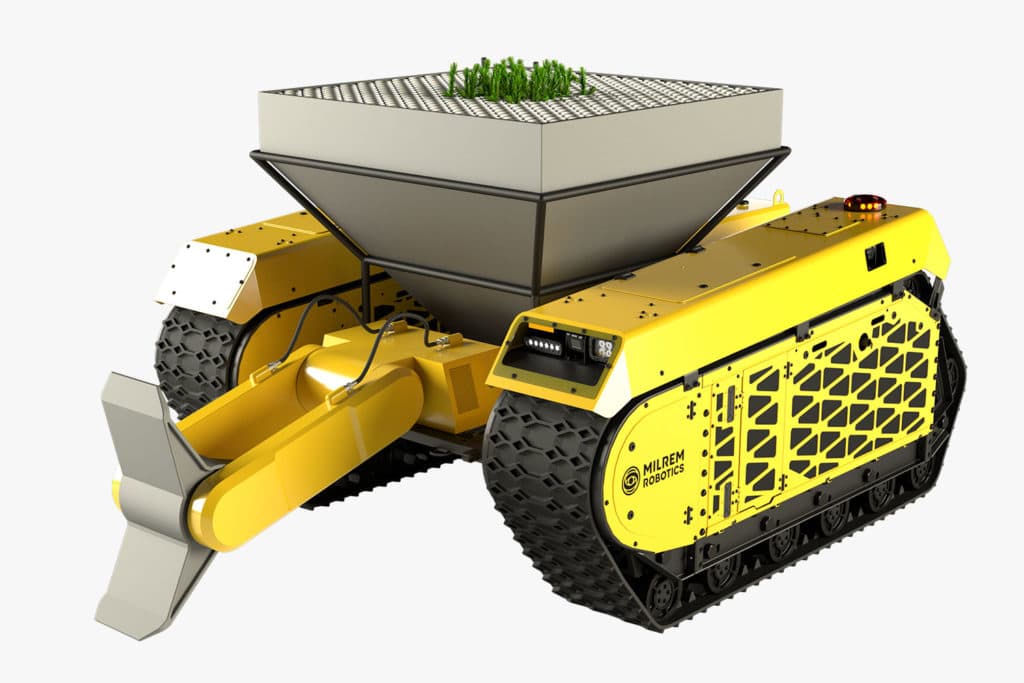
Uno de los robots es una plantadora, llamada Multiscope Forester Planter, que está equipada con una carga útil de plantación modular con capacidad para 380 plantones. Su velocidad de plantación es de unas 5-7 horas por hectárea, dependiendo de la especie de árbol y del terreno. También registra la ubicación exacta de cada árbol.
El otro de los dos robots forestales, el Robotic Forester Brushcutter, está equipado con una unidad de potencia hidráulica, una herramienta de desbroce y los sensores necesarios para el movimiento de la herramienta, puede eliminar la vegetación alrededor de los plantones.
El robot se ha diseñado para ser resistente y duradero en entornos difíciles como las zonas de desbroce. El mismo sistema puede utilizarse con otras aplicaciones para el mantenimiento de líneas eléctricas, mantenimiento de bordes de carreteras, etc…

Los robots forestales tienen el tamaño de un coche pequeño y pesan alrededor de una tonelada. Ambos miden 240 cm de largo, 200 cm de ancho y 115 cm de alto, y pueden alcanzar una velocidad máxima de 20 km/h.
Su sistema de navegación usa sistemas de posicionamiento global, cámaras y LiDAR basados en láser. El LiDAR produce una representación geométrica tridimensional del entorno, mientras que las imágenes de la cámara de alta resolución rellenan los espacios en blanco. Todos los datos se combinan en tiempo real, complementándose entre sí y haciendo posible que los robots forestales se conduzcan de forma autónoma en un bosque. Las cámaras también se usan para el reconocimiento de imágenes y proporcionan una pantalla visual para el operador si necesita dirigir el robot a distancia.
Esta es una de las muchas aplicaciones interesantes… que demuestran que la tecnología de la robótica móvil está madurando rápidamente y permite a los robots abordar nuevos tipos de tareas en entornos difíciles.
Andrew Davidson, Imperial College London.
Más información: milremrobotics.com


Deja una respuesta