

Más del 70% de la superficie terrestre está cubierta de océanos, que por desgracia están muy contaminados. Una de las estrategias para combatir los montones de residuos que se encuentran en estos ecosistemas tan sensibles es emplear robots submarinos para que se encarguen de la limpieza. Sin embargo, los prototipos existentes suelen ser voluminosos y ruidosos, y configuraciones con muy limitadas.
Ahora, ingenieros del Instituto Max Planck de Sistemas Inteligentes (MPI-IS) de Stuttgart han diseñado un robot inspirado en una medusa con el que esperan poder recoger algún día los residuos del fondo del océano. El Jellyfish-Bot, casi insonoro, puede atrapar objetos bajo su cuerpo sin contacto físico, lo que permite interacciones seguras en entornos delicados como los arrecifes de coral.
Con el tamaño aproximado de una mano, el nuevo robot consta de una serie de seis brazos electrohidráulicos que actúan como músculos artificiales que impulsan al robot. Los músculos artificiales accionados eléctricamente, conocidos como HASEL, son básicamente bolsas de plástico rellenas de dieléctrico líquido que están parcialmente cubiertas por electrodos.
Al aplicar un alto voltaje a un electrodo, éste se carga positivamente mientras que el agua circundante se carga negativamente. Esto genera un agua cargada negativamente que empuja el aceite del interior de las bolsas hacia delante y hacia atrás, haciendo que los actuadores ejecuten su movimiento de aleteo.
Los músculos artificiales se contraen y relajan mediante corrientes eléctricas periódicas que fluyen por los cables, lo que permite al robot submarino nadar con gracia y crear remolinos bajo su cuerpo.
Cuando una medusa nada hacia arriba, puede atrapar objetos a su paso al crear corrientes alrededor de su cuerpo. De este modo, también puede recoger nutrientes. Nuestro robot también hace circular el agua a su alrededor. Esta función es útil para recoger objetos como partículas de desecho. A continuación, puede transportar la basura a la superficie, donde posteriormente puede reciclarse. También es capaz de recoger muestras biológicas frágiles, como huevos de peces. Mientras tanto, no tiene ningún impacto negativo en el medio ambiente circundante. La interacción con las especies acuáticas es suave y casi sin ruido.
Tianlu Wang, postdoctor del Departamento de Inteligencia Física del MPI-IS y primer autor de la publicación.
Los Jellyfish-Bots pueden mover y atrapar objetos sin contacto físico, funcionando solos o con varios en combinación. Cada robot funciona más rápido que otros inventos comparables, alcanzando una velocidad de hasta 6,1 cm/s. Los robots sólo necesitan 100 mW de electricidad, lo que significa que no suponen ningún peligro para el ser humano o la vida acuática, incluso si se desgasta la capa aislante que los rodea.
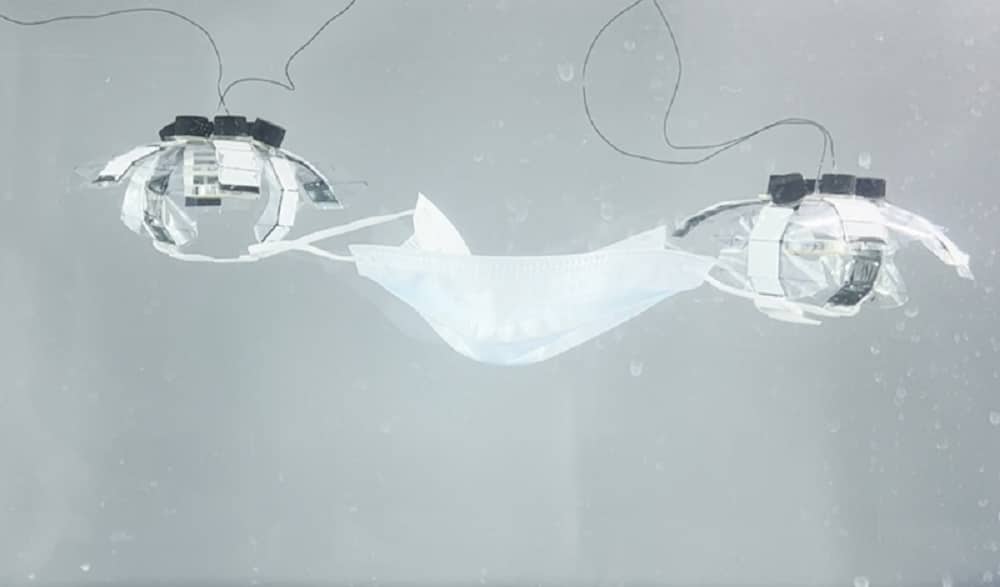
Además, los investigadores pudieron demostrar que el robot podía ejecutar movimientos de agarre cuando dos de los brazos se acercaban el uno al otro. Además, los dos robots podían trabajar juntos para coger objetos más complicados, como una mascarilla, algo muy difícil para un solo robot.
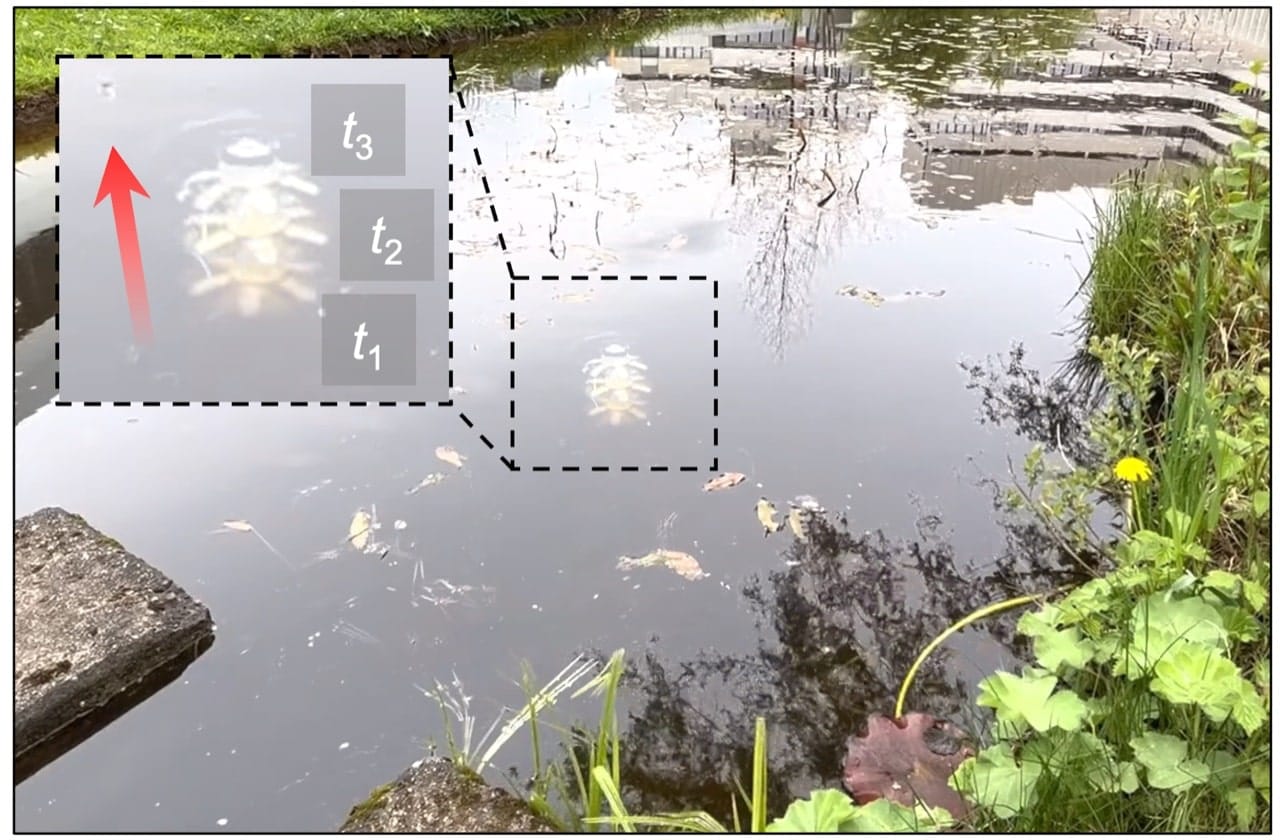
Por ahora, los Jellyfish-Bots necesitan un cable para funcionar, pero el equipo ya ha ideado módulos para la batería y las piezas de comunicación inalámbrica con el fin de permitir la manipulación sin cables en el futuro. Los investigadores probaron su invento en el estanque y pudieron dirigirlo con éxito. El equipo trabaja ahora en mejoras que puedan ofrecer más control sobre la dirección y la movilidad, especialmente en entornos oceánicos difíciles.
Vía is.mpg.de

Deja una respuesta