


El ingeniero y YouTuber Luke Maximo Bell creó un dron capaz de volar más de 3,5 horas con una sola carga, superando ampliamente los récords conocidos.
- 🛸 Objetivo: construir el dron multirrotor más eficiente del mundo y superar el récord de 3h12min.
- 🔧 Componentes clave: hélices gigantes de 40″, motores de alto par y diseño optimizado en CAD.
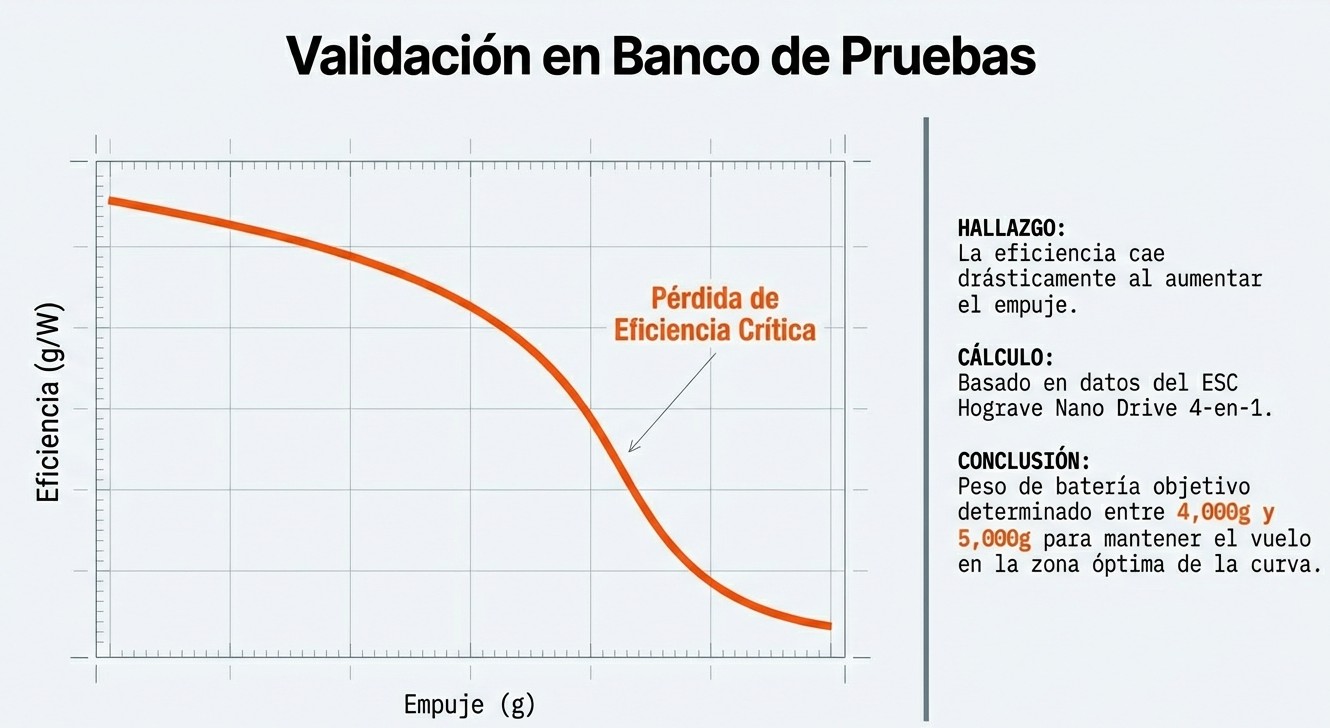
- 📊 Pruebas: banco de empuje, simulaciones CFD y análisis de cableado para minimizar pérdidas.
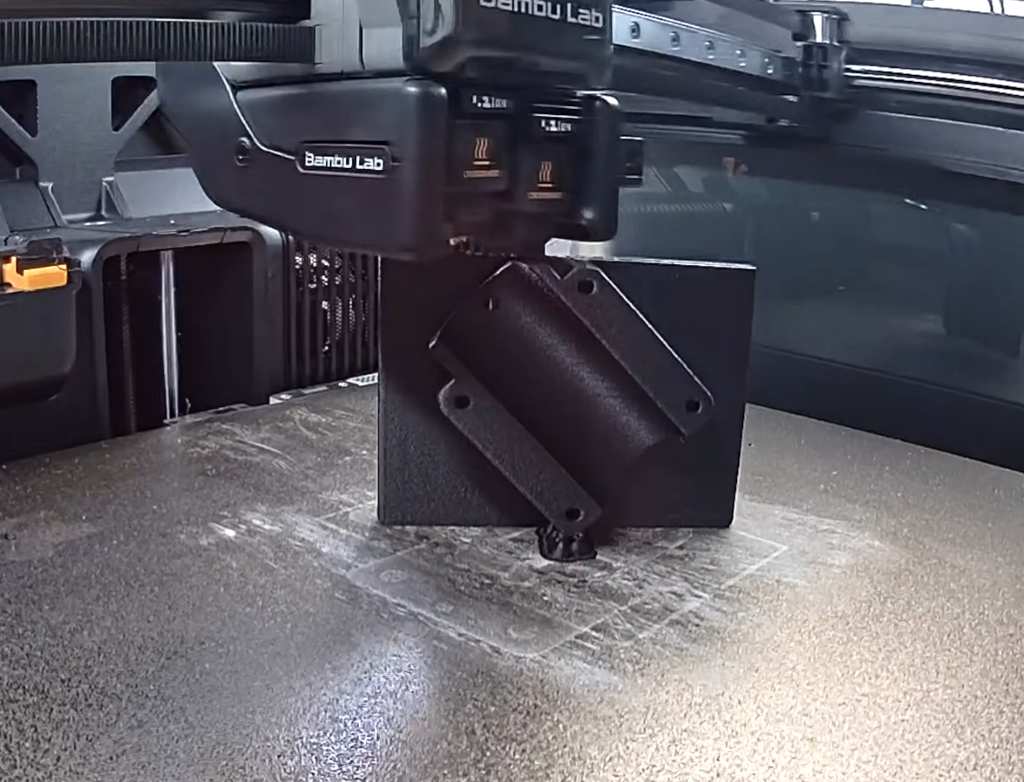
- 🧩 Construcción: piezas impresas en 3D, brazos reforzados, electrónica ajustada y nuevo GPS/cámara.
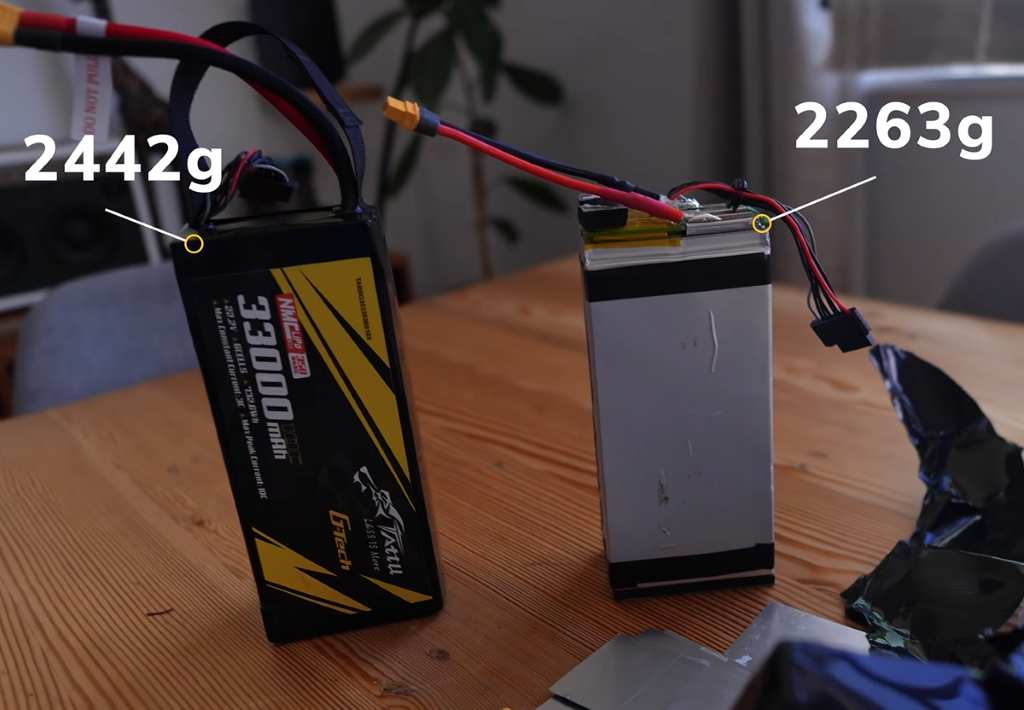
- 🔋 Baterías especiales: NMC semisólidas con el doble de densidad energética; se aligeran quitando packaging.
- 🚁 Vuelo final: mantiene posición estable durante horas; en vuelo hacia adelante consume menos energía.
- 🏆 Resultado: 3h31min06s de vuelo → nuevo récord no oficial.
- 🚀 Siguiente paso: intento oficial en vuelo hacia adelante para superar ampliamente la marca.
Un objetivo claro: volar más tiempo que nadie
La obsesión no es la velocidad ni la maniobrabilidad. Aquí todo gira en torno a una sola idea: mantener un multirrotor en el aire durante el mayor tiempo físicamente posible. El punto de referencia es ambicioso, un récord que durante años parecía inalcanzable para drones de este tipo. Superarlo implica aceptar una realidad incómoda: no existe una mejora milagro. Solo decenas de decisiones pequeñas, todas orientadas a reducir pérdidas.
Récord anterior
El récord anterior pertenecía a Sci-Fly con su dron llamado Q12.
Este récord, que servía como punto de referencia a batir para Luke, consistía en un tiempo de vuelo de 3 horas y 12 minutos con una sola carga. El nuevo diseño logró superar esta marca, alcanzando finalmente las 3 horas, 31 minutos y 6 segundos.
Desde el primer momento, el planteamiento es honesto. No se parte de suposiciones ni de tablas genéricas, sino de medición directa, prueba a prueba, componente a componente. La eficiencia deja de ser un concepto abstracto y se convierte en números muy concretos: gramos de empuje por vatio.
Hélices enormes, motores tranquilos
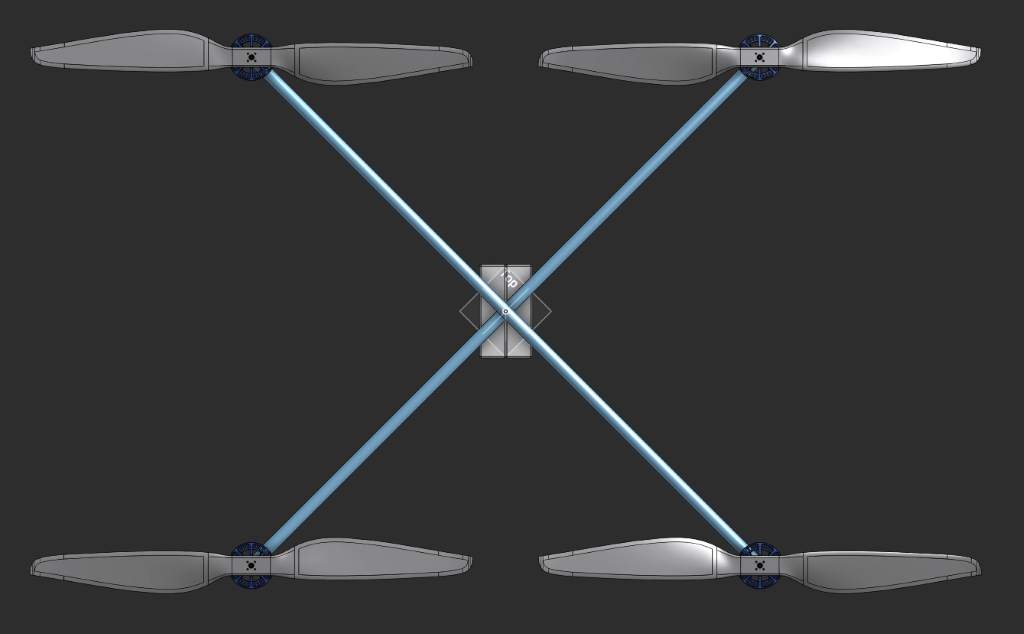
Lo que hace fascinante a este diseño es que desafía la imagen mental que todos tenemos de un dron. En lugar de depender de pequeñas hélices girando frenéticamente, aquí la estrategia fue irse al extremo opuesto: montar unas inmensas hélices de fibra de carbono de 40 pulgadas (casi un metro de diámetro).
Aunque la diferencia de tamaño resulte casi cómica comparada con un dron normal, la física detrás es impecable: al ser tan grandes, pueden generar todo el empuje necesario girando a muy bajas revoluciones. Es justamente esa lentitud y suavidad en el giro lo que dispara la eficiencia, reduciendo el consumo eléctrico al mínimo posible.
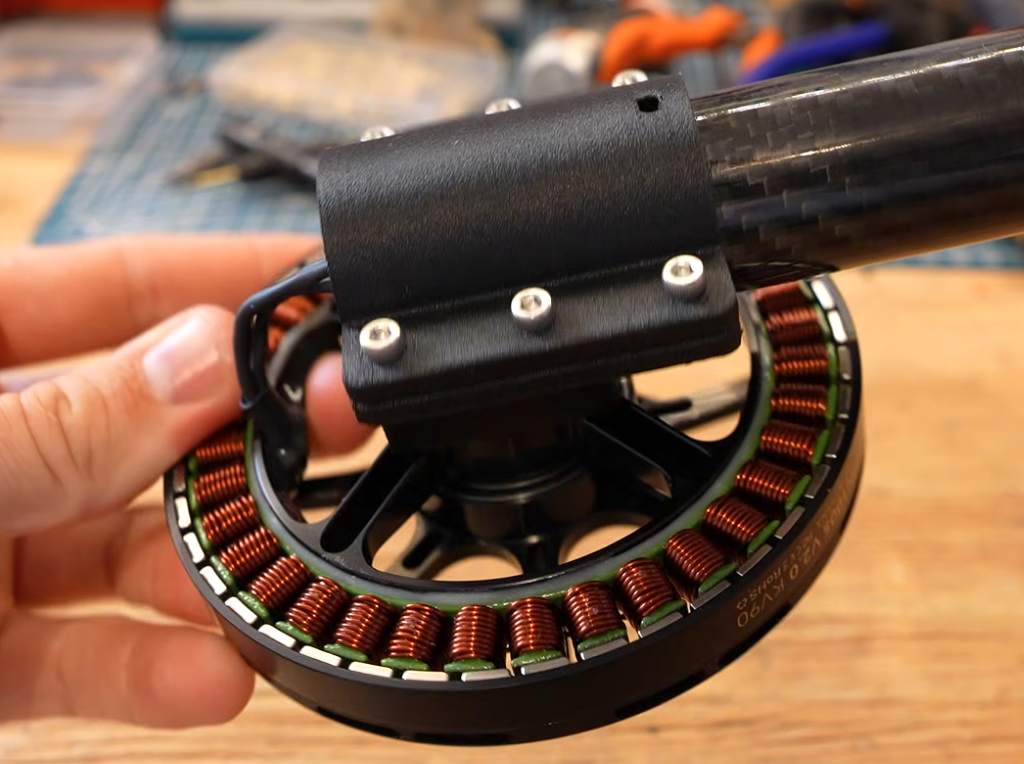
El motor acompaña esa filosofía. No se busca potencia bruta, sino par suficiente y máxima eficiencia en un rango de RPM muy bajo, un terreno poco explorado incluso por fabricantes especializados. Al no existir datos públicos fiables para esta combinación concreta, se construye un banco de pruebas específico. Nada de teoría sin contraste.

Medir antes de decidir
El banco de empuje permite algo clave: relacionar directamente potencia consumida y empuje generado. A partir de ahí aparecen las curvas que mandan en todo el proyecto. Se confirma lo esperado —más empuje implica menor eficiencia— pero también se identifican zonas óptimas muy claras.
Con esos datos sobre la mesa, el peso de la batería deja de ser una elección intuitiva. Demasiado ligera y el tiempo total cae; demasiado pesada y el propio peso penaliza el sistema. El equilibrio aparece en un rango muy concreto, afinado con cálculos y simulaciones, no con suposiciones.

Aerodinámica que sí importa en un multirrotor
Aunque los multirrotores no suelen asociarse a estudios aerodinámicos finos, aquí sí marcan diferencias. El diseño pasa por simulaciones CFD para analizar interferencias entre hélices, estelas de aire y longitudes de brazo. Unos pocos centímetros de más o de menos cambian la eficiencia global.
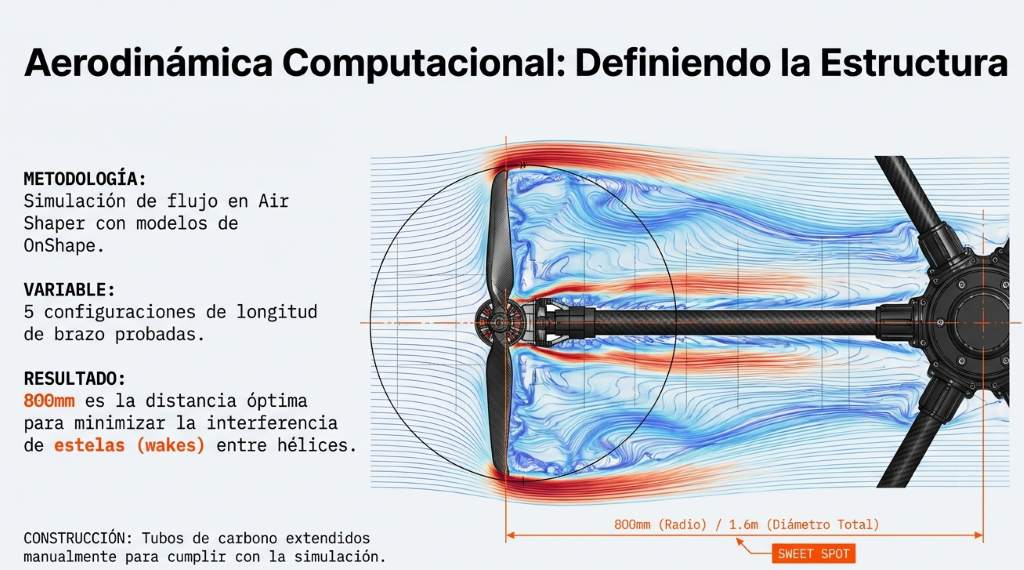
El resultado sorprende por su sencillez: existe una longitud “dulce” donde el sistema respira mejor. A partir de ahí, el reto es estructural. Brazos largos, ligeros y rígidos, fabricados en fibra de carbono y ajustados manualmente cuando las dimensiones comerciales no encajan con el diseño ideal.

Quitar peso sin comprometerlo todo
Cada pieza se revisa con lupa. Soportes de motor, núcleo central, fijaciones… todo pasa por varias versiones hasta eliminar gramos innecesarios. El peso no se resta una vez: se resta cuatro veces, una por motor. Ese enfoque cambia por completo la forma de diseñar.
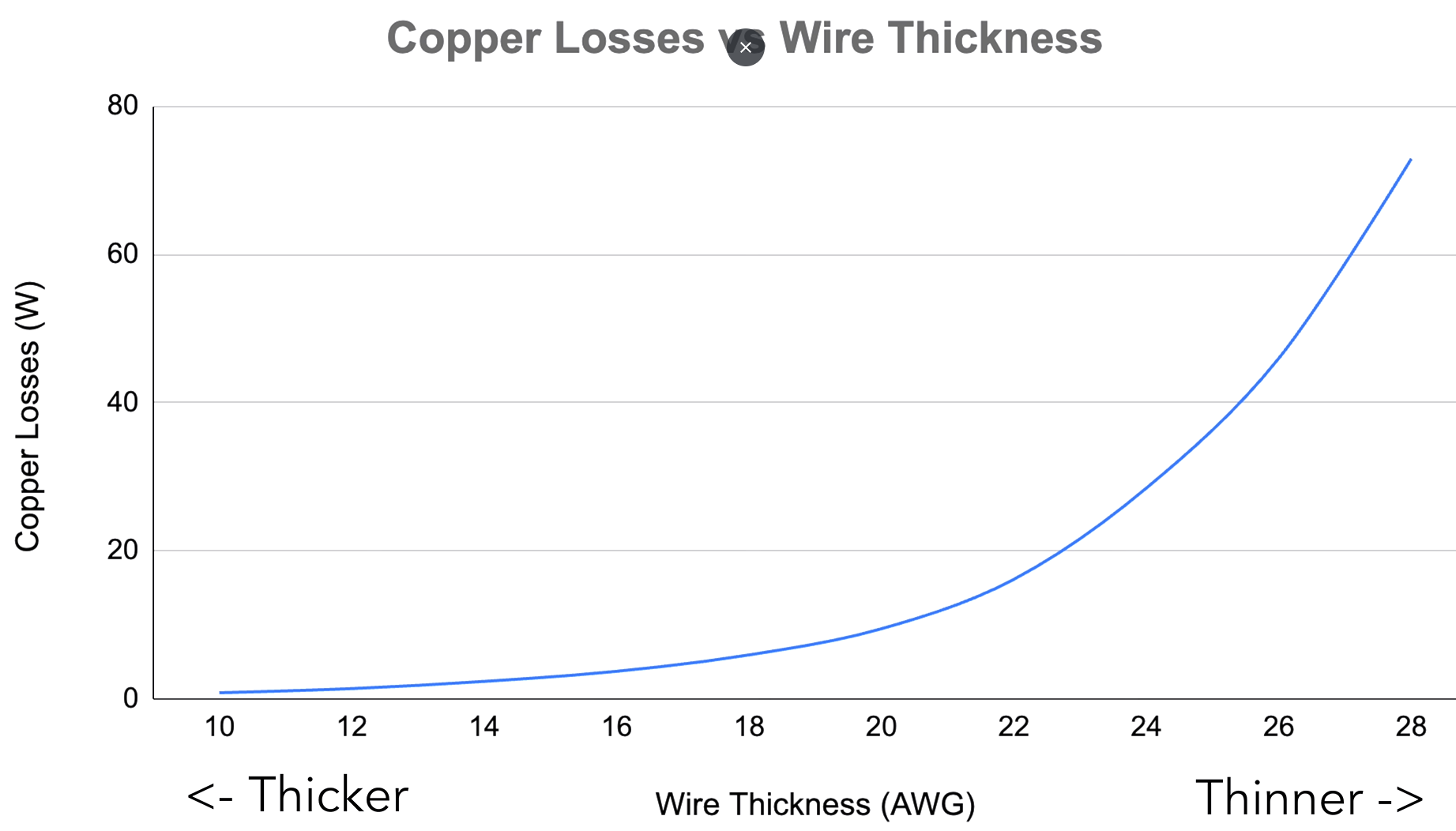
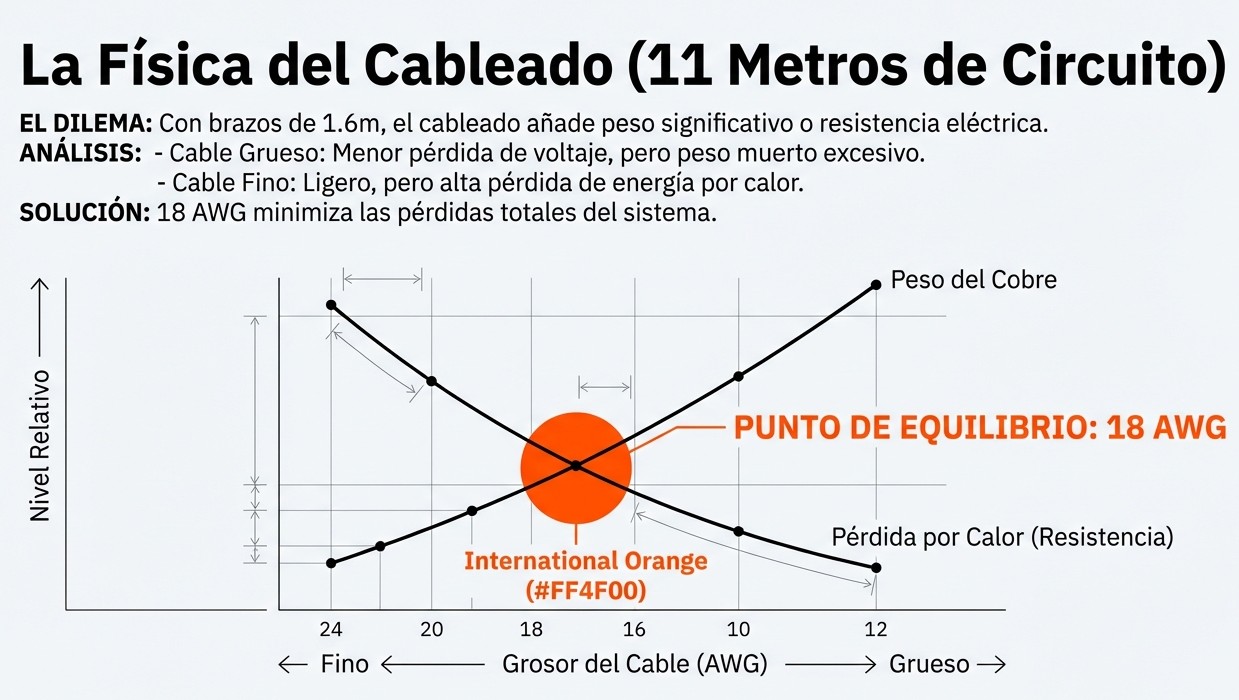
Incluso el cableado entra en juego. Cables más gruesos reducen pérdidas eléctricas, pero pesan más. Cables finos pesan menos, pero disipan energía en forma de calor. Se mide la caída de tensión metro a metro y se cruzan los datos con el peso añadido. El resultado no es intuitivo, pero sí claro: existe un calibre óptimo que minimiza el consumo total del sistema.
Electrónica pensada para resistir horas
El controlador de vuelo, el sistema de posicionamiento y la electrónica auxiliar se eligen por estabilidad y consumo, no por moda. Mantener una posición fija durante horas exige un control fino, sin correcciones bruscas ni oscilaciones que disparen el gasto energético.
El ajuste no es inmediato. Hay pruebas fallidas, oscilaciones peligrosas, incluso algún impacto. Forma parte del proceso. Cada error aporta información real, y el diseño se adapta: patas de aterrizaje reforzadas, soportes rediseñados, fijaciones adicionales para evitar torsiones no deseadas.

Baterías: densidad antes que potencia
La pieza final del puzle son las baterías. No interesa una descarga brutal ni picos de corriente. Lo que importa es energía por kilogramo. Se opta por baterías de alta densidad energética, con una relación energía-peso muy superior a la de las baterías convencionales usadas en drones de acrobacia o carreras.
Para exprimirlas al máximo, se elimina parte del encapsulado innecesario. No es una solución replicable sin conocimientos ni exenta de riesgos, pero demuestra hasta qué punto el peso muerto condiciona la autonomía. Cada gramo ahorrado se traduce en minutos reales de vuelo.
El vuelo que lo cambia todo
Cuando llega el día decisivo, no hay espectáculo. El dron despega, se queda ahí arriba… y pasa el tiempo. Primero minutos, luego horas. En vuelo estacionario ya supera registros históricos. En desplazamiento lento, el consumo cae de forma drástica. La diferencia entre mantenerse quieto y avanzar suavemente es enorme.
El resultado final impresiona incluso a quien lo ha diseñado: 3 horas, 31 minutos y 6 segundos en el aire. Un nuevo récord no oficial para un multirrotor. Y, quizá más importante, la confirmación de que aún queda margen.
¿Qué decisiones de diseño permitieron superar el récord de vuelo?
Para superar el récord de vuelo anterior (que era de 3 horas y 12 minutos), Luke tomó una serie de decisiones de ingeniería centradas obsesivamente en la eficiencia y la reducción de peso.
1. Selección del sistema de propulsión (Hélices y motores). El diseño se basó en el principio de que «cuanto más grande es la hélice, más eficiente es«, ya que pueden generar mucho empuje girando a bajas revoluciones (RPM).

- Hélices: Usó hélices T-Motor G40 de 40 pulgadas (aprox. 1 metro) de fibra de carbono.
- Motores ligeros: Eligió los motores más pequeños y ligeros posibles que aún tuvieran la suficiente potencia para mover esas hélices. Seleccionó los T-Motor Antigravity MN105 V2 de 90 KV.

2. Baterías de alta densidad energética. Esta fue quizás la decisión más crítica para la duración.
- Tecnología NMC: En lugar de baterías LiPo tradicionales, usó baterías NMC (níquel-manganeso-cobalto) de estado semi-sólido de la marca Tattu.
- Ventaja de peso: Estas baterías tienen una densidad de energía de aproximadamente 320 Wh/kg, el doble que una LiPo estándar (160 Wh/kg), permitiendo llevar el doble de capacidad por el mismo peso.
- Modificación extrema: Para ahorrar aún más peso, retiró el embalaje protector y cambió los conectores grandes (XT90) por unos más pequeños (XT60). Esto ahorró 360 gramos en total, lo cual equivale al peso de todo el chasis de fibra de carbono.

3. Optimización aerodinámica y estructural.
- Longitud de los brazos: Utilizó simulaciones de CFD (Dinámica de Fluidos Computacional) para analizar el flujo de aire y la eficiencia. Determinó que una longitud de brazo de 800 mm era el punto óptimo («sweet spot») para la máxima eficiencia.
- Reducción de material: Rediseñó piezas impresas en 3D, como los soportes de los motores y el eje central, haciéndolos más pequeños y ligeros. Por ejemplo, el rediseño del eje central ahorró 40 gramos.

4. Cálculo preciso del cableado. Dado que el dron tiene brazos muy largos, necesitaba 11 metros de cable para los motores.
- Luke calculó el equilibrio exacto entre el peso del cable y la pérdida de energía por resistencia (calor).
- Determinó que el calibre 18 AWG era el grosor perfecto para minimizar las pérdidas de potencia sin añadir peso excesivo innecesario.
5. Estrategia de vuelo. Aunque el récord se logró principalmente en vuelo estacionario, durante la prueba descubrió que el vuelo de avance lento (forward flight) reducía el consumo de energía de 400 W a 250 W. Esto sugiere que futuros diseños o intentos podrían durar aún más utilizando patrones de vuelo autónomos en lugar de solo flotar.
Potencial
La tecnología mostrada aquí apunta a usos muy concretos y realistas. Drones capaces de permanecer horas en el aire pueden vigilar parques eólicos y solares, detectar fallos sin necesidad de desplazamientos constantes o monitorizar ecosistemas sensibles sin perturbarlos.

En emergencias ambientales, incendios o vertidos, una mayor autonomía permite menos vuelos, menos recursos y respuestas más rápidas. Y a medio plazo, la combinación de estos diseños con energía solar integrada o sistemas híbridos podría ampliar aún más ese tiempo de operación.
No es ciencia ficción. Es ingeniería afinada, paciente, casi obsesiva. Y precisamente por eso, funciona.
Vía Luke Maximo Bell

Eduardo Jaime Gonzales medina dice
Excelente, aplico los códigos de la buena ingeniería 👍
LUIS COILLA dice
Me ha sorprendido el artículo respecto a este dron tan eficiente, me interesa adquirir uno cuando pase a fase comercial
Patricio Anguita q. dice
muy interesante. yo busque lo mismo hace alcunos años. limitado por los costos y suministros. logre 1h 10 min. y pack liion 18650. 6p
Luis Sánchez dice
Vaya, podían haber explicado un poco la gran diferencia de consumo del vuelo estático (se supone que sin efecto suelo) y el vuelo en movimiento. Y de paso decir a qué velocidad es menor el consumo. Física!
Juan Salvador dice
Inteligente, pero No tuvo en cuenta el FACTOR VIENTO, demasiadas dimensiones para tan poco peso, asi el viento lo puede mover fácil, y ni te cuento las lluvias o tormentas, con semejante superficie de hélice y 0 peso, tormenta no aguanta