


Ingenieros de la Universidad RMIT desarrollan minibot “Electronic Dolphin” que recoge petróleo con un filtro inspirado en erizos de mar.
- Robot del tamaño de una zapatilla.
- Inspiración en erizos de mar microscópicos.
- Filtro que repele el agua y captura el petróleo.
- Recuperación del aceite con más del 95 % de pureza.
- Respuesta rápida en zonas peligrosas o sensibles.
- Tecnología reutilizable y con recubrimiento ecológico.
- Posible despliegue de enjambres de robots autónomos.
Un “delfín electrónico” para aspirar derrames de petróleo
Los derrames de petróleo siguen siendo uno de los desastres ambientales más persistentes en mares y costas. Incluso pequeños vertidos pueden alterar ecosistemas durante años: aves cubiertas de crudo, peces intoxicados, playas contaminadas, cadenas alimentarias alteradas. Limpiar todo eso requiere enormes recursos y, muchas veces, expone a los equipos de rescate a condiciones peligrosas.
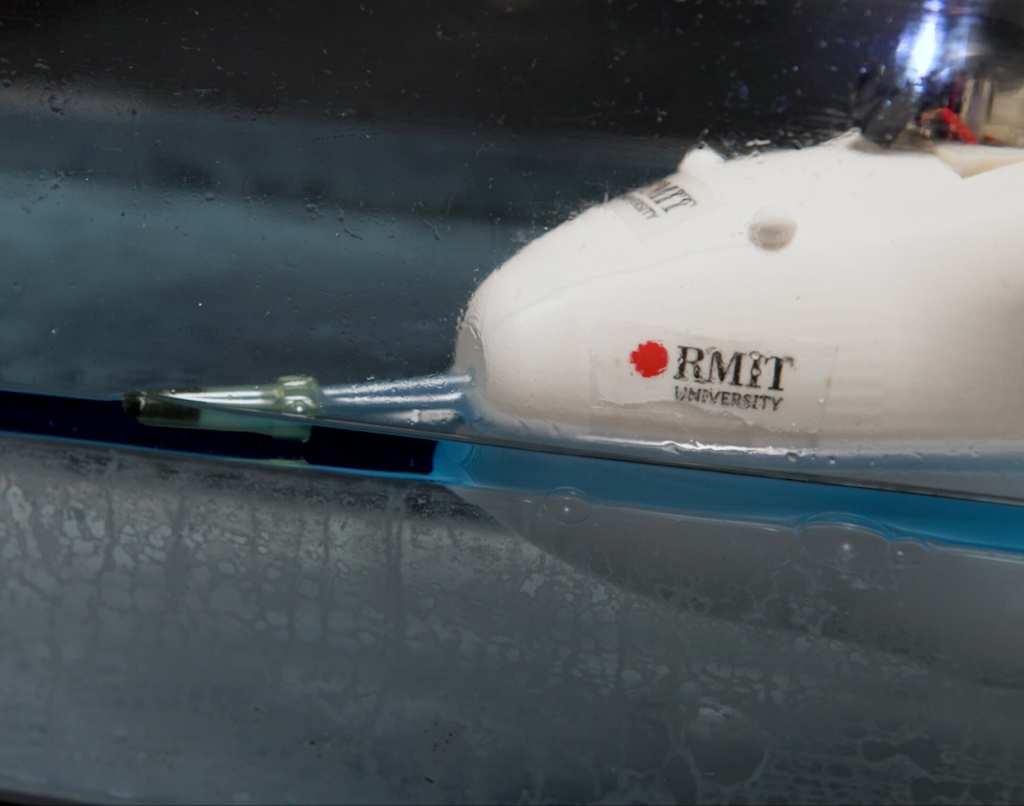
Un grupo de ingenieros de RMIT University (Australia) ha desarrollado un prototipo que propone otra forma de afrontar el problema: un pequeño robot acuático llamado Electronic Dolphin, diseñado para recoger petróleo directamente de la superficie del agua.
El dispositivo —aproximadamente del tamaño de una zapatilla— puede controlarse a distancia y está equipado con un sistema de filtrado y bombeo frontal que aspira el petróleo mientras navega sobre la mancha. Su forma recuerda a un pequeño delfín, algo más que una elección estética: el diseño hidrodinámico permite moverse con agilidad incluso en zonas complejas como puertos, manglares o áreas costeras poco profundas.
La investigación ha sido publicada en la revista científica Small, especializada en nanomateriales y tecnologías avanzadas.
Un filtro inspirado en los erizos de mar
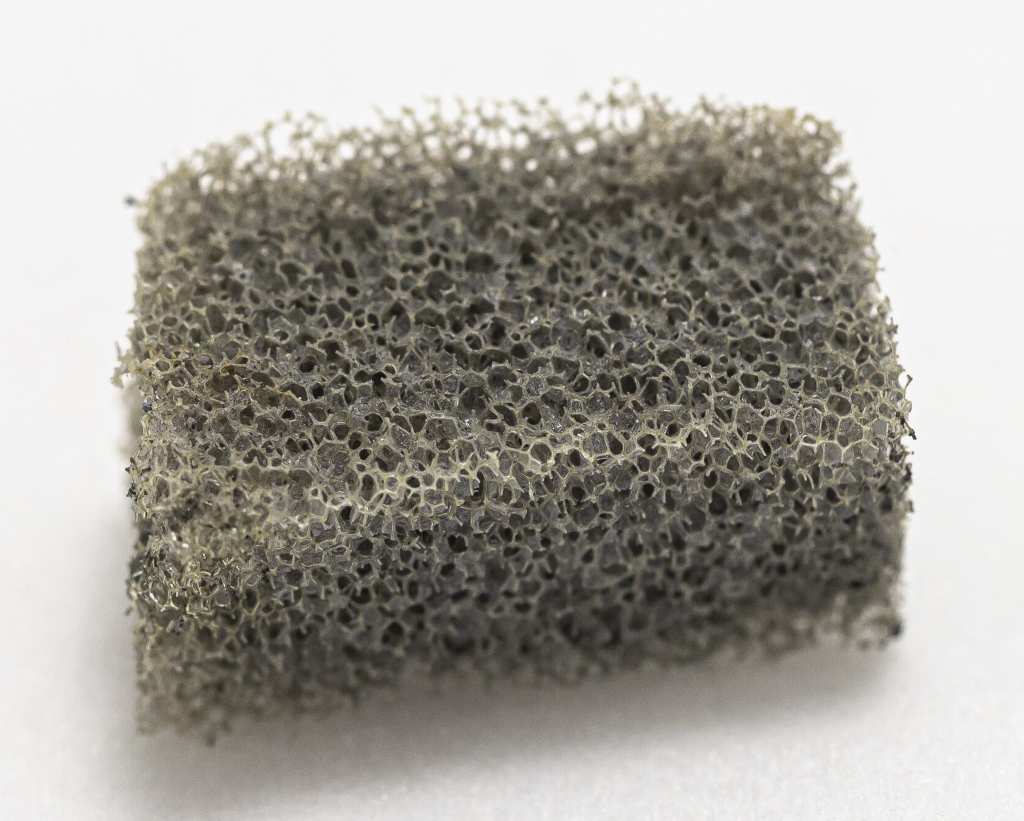
El corazón de esta tecnología está en el material filtrante. Los investigadores desarrollaron un recubrimiento microscópico con estructura similar a los erizos de mar, formado por diminutas espinas invisibles al ojo humano.
Estas microestructuras crean pequeñas bolsas de aire sobre la superficie del filtro. El resultado es una propiedad clave: el agua resbala y el petróleo se adhiere.
En otras palabras, el material es superhidrofóbico (rechaza el agua) y oleofílico (atrae el aceite). Esto permite separar ambos fluidos de manera eficiente sin necesidad de productos químicos agresivos, algo habitual en algunos sistemas tradicionales de limpieza.
En las pruebas de laboratorio, el prototipo logró recuperar unos 2 mililitros de petróleo por minuto con una pureza superior al 95 %, evitando que el filtro se empapara de agua. Puede parecer una cantidad modesta, pero el concepto está pensado para escalarse.
Aquí está la clave: muchos robots pequeños trabajando al mismo tiempo.

Robots pequeños, respuesta rápida
El investigador principal, Ataur Rahman, explica que la idea no es reemplazar los grandes barcos de limpieza, sino complementarlos con plataformas ágiles.
Los robots de este tipo podrían desplegarse rápidamente en áreas donde el acceso humano es difícil o arriesgado: zonas con fauna protegida, arrecifes, puertos industriales o incluso derrames cerca de plataformas petroleras.
El prototipo actual funciona durante unos 15 minutos por carga, aunque el equipo ya trabaja en versiones más grandes con mayor capacidad de batería y almacenamiento de petróleo.
La visión a largo plazo resulta interesante: robots del tamaño de un delfín capaces de aspirar petróleo, regresar a una base flotante, vaciar el depósito, recargarse y volver automáticamente al trabajo. Un ciclo continuo hasta eliminar la mancha.
Algo parecido a un enjambre de drones, pero en el océano.

Cuando la inspiración nace de la experiencia personal
El desarrollo del material filtrante estuvo liderado por el investigador doctoral Surya Kanta Ghadei, quien creció en la India observando las consecuencias de la contaminación marina.
En muchas regiones costeras del mundo, los derrames no solo afectan al ecosistema: también golpean la pesca artesanal, el turismo y la seguridad alimentaria.
Ese recuerdo —tortugas marinas atrapadas en manchas de petróleo— fue, según explica el propio investigador, uno de los motivos que lo llevó a buscar soluciones tecnológicas para actuar más rápido y con menos impacto ambiental.
Próximos pasos: del laboratorio al mar
El equipo trabaja ahora en varios frentes para convertir el prototipo en una herramienta real de intervención ambiental.
Uno de ellos consiste en aumentar la superficie filtrante del robot, lo que permitiría capturar más petróleo en menos tiempo. Otro reto es mejorar la capacidad de bombeo y almacenamiento, además de evaluar la resistencia del material tras múltiples ciclos de uso.
También serán necesarias pruebas en entornos reales, donde factores como corrientes, viento o emulsiones de petróleo pueden complicar la operación.
Los investigadores buscan ahora colaboración con la industria energética y con organismos de respuesta ambiental para probar el sistema a mayor escala.
Potencial
Aunque esta tecnología aún está en fase experimental, su enfoque abre varias posibilidades interesantes para la transición hacia una gestión ambiental más inteligente.
Por ejemplo, flotas de robots autónomos podrían monitorizar continuamente puertos y zonas industriales donde el riesgo de fugas es elevado. Detectar y recoger pequeñas cantidades de petróleo antes de que se conviertan en grandes derrames marcaría una enorme diferencia.
También podrían integrarse en sistemas de vigilancia marina, combinando sensores, inteligencia artificial y drones para localizar rápidamente manchas en el agua.
Otra aplicación potencial aparece en la limpieza de microderrames crónicos, un problema frecuente en zonas portuarias donde pequeñas filtraciones se acumulan durante años.
Incluso podría pensarse en versiones adaptadas para ríos contaminados, canales industriales o lagunas costeras.
La idea de fondo es sencilla: tecnología ligera, adaptable y reutilizable al servicio de la restauración ambiental.
A veces las soluciones no llegan en forma de grandes infraestructuras. A veces llegan… con el tamaño de una zapatilla.
Vía www.rmit.edu.au
Más información: Surya Kanta Ghadei et al, Multifunctional Superwetting Sea‐Urchin‐Mimetic Nanosheet‐Based Interface for Remote Oil‐Water Separation, Small (2026). DOI: 10.1002/smll.202512846

Deja una respuesta