

Ingenieros de Arizona State desarrollan músculos robóticos HARP que permiten robots 100 veces más fuertes y totalmente autónomos.
- Robots más ligeros, más eficientes.
- Músculos artificiales flexibles, silenciosos.
- Capacidad de carga hasta 100 veces su peso.
- Menor consumo energético, mayor autonomía.
- Aplicaciones reales: agricultura, rescate, industria, salud.
- Interacción segura con personas y entornos delicados.
Nuevos músculos para robots más ligeros y autónomos
La robótica lleva años persiguiendo un equilibrio complicado: máquinas potentes pero ligeras, capaces de moverse con agilidad sin depender de sistemas pesados o cables externos. Ahora, un equipo de investigadores de la Universidad Estatal de Arizona ha dado un paso relevante con el desarrollo de músculos artificiales inspirados en la biología, diseñados para imitar el funcionamiento de los tejidos naturales.
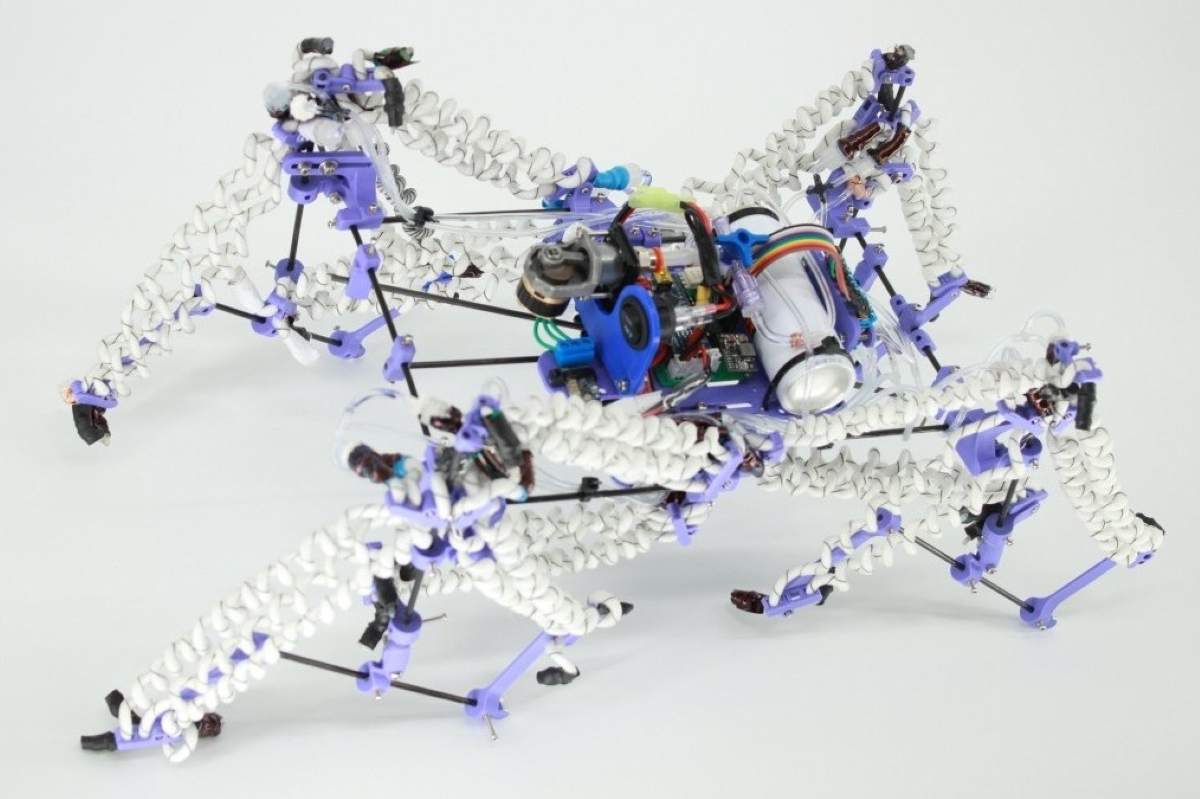
Estos actuadores, conocidos como HARP (polímeros reforzados anisotrópicamente con estructura helicoidal), no solo replican el movimiento de contracción y expansión de un músculo real. Van más allá. Permiten ajustar propiedades como la rigidez o la fuerza en función de la tarea. Eso cambia las reglas del juego.
El resultado es claro: robots más pequeños, más ligeros y capaces de funcionar sin conexión constante a una fuente de energía externa. Algo que, hasta ahora, limitaba mucho su uso fuera de entornos controlados.
Cómo funcionan estos músculos artificiales
A simple vista, estos músculos recuerdan a pequeños tubos enrollados en espiral, similares a una pasta tipo cavatappi. Pero su comportamiento es mucho más sofisticado.
Al aplicar aire a baja presión, el sistema se expande y contrae de forma controlada, generando movimiento. Lo interesante es que requieren menos presión que tecnologías anteriores, lo que se traduce en menor consumo energético y sistemas más compactos.
Además, su diseño permite desacoplar propiedades mecánicas clave, como la dirección de la fuerza o la flexibilidad. En otras palabras: se pueden “configurar” para tareas muy distintas sin rediseñar el sistema desde cero.
Y aquí está uno de los puntos fuertes. Frente a los motores eléctricos tradicionales, estos músculos ofrecen una relación potencia-peso muy superior, lo que permite levantar cargas muy elevadas sin penalizar la movilidad.
Aplicaciones reales: del rescate a la agricultura
El potencial de esta tecnología no se queda en el laboratorio. Ya se plantean usos muy concretos en distintos sectores.
En situaciones de emergencia, por ejemplo, los robots blandos podrían introducirse entre escombros tras un terremoto. Su flexibilidad permite moverse en espacios reducidos sin causar daños adicionales. Algo clave cuando hay vidas en juego.
En agricultura, estos sistemas abren la puerta a una mecanización más delicada. Un brazo robótico flexible podría desplazarse entre hojas densas —como en cultivos de tomate o fresa— y realizar tareas como la polinización sin dañar la planta. Frente a los drones, que generan corrientes de aire, esta solución resulta mucho más suave.
También en entornos industriales complejos, como plantas químicas, estos robots permiten inspecciones sin detener la producción, reduciendo costes y tiempos muertos. Menos interrupciones, más eficiencia.
Y en el ámbito doméstico o asistencial, podrían ayudar a personas mayores en tareas cotidianas. Sin riesgo. Sin movimientos bruscos.

Brazos robóticos inspirados en la naturaleza
Otro desarrollo interesante del mismo laboratorio es un brazo robótico inspirado en la trompa de un elefante. Un diseño que combina alcance, precisión y flexibilidad.
Este tipo de dispositivos puede rodear obstáculos, acceder a zonas difíciles y manipular objetos sin dañarlos. Algo especialmente útil en entornos donde los equipos son sensibles o donde trabajan personas cerca.
La clave está en su comportamiento “complaciente”, es decir, su capacidad de adaptarse al entorno en lugar de imponer rigidez. Una diferencia sutil… pero decisiva.
Dispositivos de asistencia más ligeros y eficientes
La tecnología de músculos artificiales también se está aplicando en dispositivos de apoyo físico. Un ejemplo es el desarrollo de un sistema de soporte lumbar pensado para trabajos que requieren esfuerzo físico.
A diferencia de los exoesqueletos tradicionales, que suelen ser pesados, este sistema combina elementos activos y pasivos. El resultado es un dispositivo ligero, ajustable y adaptable a distintas tareas, capaz de ofrecer asistencia solo cuando es necesario.
Ese matiz importa. Permite reducir la fatiga sin limitar el movimiento natural del usuario. Y evita esa sensación de “llevar una máquina encima”.
Potencial
La clave de esta tecnología está en su capacidad de integrarse en sistemas más amplios. No es solo una mejora técnica. Es una herramienta que puede cambiar cómo se diseñan procesos completos.
En agricultura, podría facilitar una automatización de precisión, reduciendo desperdicios y mejorando rendimientos sin aumentar el impacto ambiental.
En industria, permite avanzar hacia modelos más flexibles y eficientes, donde la producción se adapta en tiempo real con menor consumo de recursos.
En el ámbito social, abre la puerta a tecnologías de asistencia más accesibles, ligeras y cómodas. Algo especialmente importante en una población cada vez más envejecida.
Y mirando más lejos —sí, incluso al espacio— estos sistemas podrían facilitar misiones más ligeras y eficientes, donde cada gramo cuenta.
No es una revolución inmediata. Pero sí un cambio de dirección. Más parecido a la naturaleza, menos dependiente de soluciones rígidas y pesadas.
Y eso, en sostenibilidad, suele ser buena señal.
Vía ASU News

Deja una respuesta